Уильям Стивенс - UNIX: разработка сетевых приложений
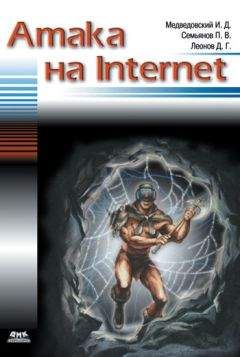
Рис. 6.3. Модель мультиплексирования ввода-вывода
Процесс блокируется в вызове функции select, ожидая, когда дейтаграммный сокет будет готов для чтения. Когда функция select возвращает сообщение, что сокет готов для чтения, процесс вызывает функцию recvfrom, чтобы скопировать дейтаграмму в буфер приложения.
Сравнивая рис. 6.3 и 6.1, мы не найдем в модели мультиплексирования ввода- вывода каких-либо преимуществ, более того, она даже обладает незначительным недостатком, поскольку использование функции select требует двух системных вызовов вместо одного. Но преимущество использования функции select, которое мы увидим далее в этой главе, состоит в том, что мы сможем ожидать готовности не одного дескриптора, а нескольких.
ПРИМЕЧАНИЕРазновидностью данного способа мультиплексирования является многопоточное программирование с блокируемым вводом-выводом. Отличие состоит в том, что вместо вызова select с блокированием программа использует несколько потоков (по одному на каждый дескриптор), которые могут блокироваться в вызовах типа recvfrom.
Модель ввода-вывода, управляемого сигналом
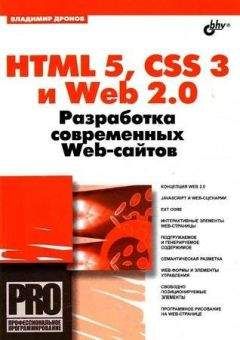
Мы можем сообщить ядру, что необходимо уведомить процесс о готовности дескриптора с помощью сигнала SIGIO. Такая модель имеет название ввод-вывод, управляемый сигналом (signal-driven I/O). Она представлена в обобщенном виде на рис. 6.4.
Рис. 6.4. Модель управляемого сигналом ввода-вывода
Сначала мы включаем на сокете управляемый сигналом ввод-вывод (об этом рассказывается в разделе 22.2) и устанавливаем обработчик сигнала при помощи системного вызова sigaction. Возвращение из этого системного вызова происходит незамедлительно, и наш процесс продолжается (он не блокирован). Когда дейтаграмма готова для чтения, для нашего процесса генерируется сигнал SIGIO. Мы можем либо прочитать дейтаграмму из обработчика сигнала с помощью вызова функции recvfrom и затем уведомить главный цикл о том, что данные готовы для обработки (см. раздел 22.3), либо уведомить основной цикл и позволить ему прочитать дейтаграмму.
Независимо от способа обработки сигнала эта модель имеет то преимущество, что во время ожидания дейтаграммы не происходит блокирования. Основной цикл может продолжать выполнение, ожидая уведомления от обработчика сигнала о том, что данные готовы для обработки либо дейтаграмма готова для чтения.
Модель асинхронного ввода-вывода
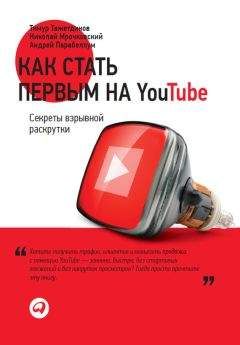
Асинхронный ввод-вывод был введен в редакции стандарта POSIX.1g 1993 г. (расширения реального времени). Мы сообщаем ядру, что нужно начать операцию и уведомить нас о том, когда вся операция (включая копирование данных из ядра в наш буфер) завершится. Мы не обсуждаем эту модель в этой книге, поскольку она еще не получила достаточного распространения. Ее основное отличие от модели ввода-вывода, управляемого сигналом, заключается в том, что при использовании сигналов ядро сообщает нам, когда операция ввода-вывода может быть инициирована, а в случае асинхронного ввода-вывода — когда операция завершается. Пример этой модели приведен на рис. 6.5.
Рис. 6.5. Модель асинхронного ввода-вывода
Мы вызываем функцию aio_read (функции асинхронного ввода-вывода POSIX начинаются с aio_ или lio_) и передаем ядру дескриптор, указатель на буфер, размер буфера (те же три аргумента, что и для функции read), смещение файла (аналогично функции lseek), а также указываем, как уведомить нас, когда операция полностью завершится. Этот системный вызов завершается немедленно, и наш процесс не блокируется в ожидании завершения ввода-вывода. В этом примере предполагается, что мы указали ядру сгенерировать некий сигнал, когда операция завершится. Сигнал не генерируется до тех пор, пока данные не скопированы в наш буфер приложения, что отличает эту модель от модели ввода-вывода, управляемого сигналом.
ПРИМЕЧАНИЕНа момент написания книги только некоторые системы поддерживали асинхронный ввод-вывод стандарта POSIX. Например, мы не уверены, что какие-либо системы поддерживают его для сокетов. Мы используем его только как пример для сравнения с моделью управляемого сигналом ввода-вывода.
Сравнение моделей ввода-вывода
На рис. 6.6 сравнивается пять различных моделей ввода-вывода. Здесь видно главное отличие четырех первых моделей в первой фазе, поскольку вторая фаза у них одна и та же: процесс блокируется в вызове функции recvfrom на то время, пока данные копируются из ядра в буфер вызывающего процесса. Асинхронный ввод-вывод отличается от первых четырех моделей в обеих фазах.
Рис. 6.6. Сравнение моделей ввода-вывода
Сравнение синхронного и асинхронного ввода-вывода
POSIX дает следующие определения этих терминов:
■ Операция синхронного ввода-вывода блокирует запрашивающий процесс до тех пор, пока операция ввода-вывода не завершится.
■ Операция асинхронного ввода-вывода не вызывает блокирования запрашивающего процесса.
Используя эти определения, можно сказать, что первые четыре модели ввода- вывода — блокируемая, неблокируемая, модель мультиплексирования ввода-вывода и модель управляемого сигналом ввода-вывода — являются синхронными, поскольку фактическая операция ввода-вывода (функция recvfrom) блокирует процесс. Только модель асинхронного ввода-вывода соответствует определению асинхронного ввода-вывода.
6.3. Функция select
Эта функция позволяет процессу сообщить ядру, что необходимо подождать, пока не произойдет одно из некоторого множества событий, и вывести процесс из состояния ожидания, только когда произойдет одно или несколько таких событий или когда пройдет заданное количество времени.
Например, мы можем вызвать функцию select и сообщить ядру, что возвращать управление нужно только когда наступит любое из следующих событий:
■ любой дескриптор из набора {1, 4, 5} готов для чтения;
■ любой дескриптор из набора {2, 7} готов для записи;
■ любой дескриптор из набора {1, 4} вызывает исключение, требующее обработки;
■ истекает 10,2 с.
Таким образом, мы сообщаем ядру, какие дескрипторы нас интересуют (готовые для чтения, готовые для записи или требующие обработки исключения) и как долго нужно ждать. Интересующие нас дескрипторы не ограничиваются сокетами: любой дескриптор можно проверить с помощью функции select.
ПРИМЕЧАНИЕБеркли-реализации всегда допускали мультиплексирование ввода-вывода с любыми дескрипторами. Система SVR3 ограничивала мультиплексирование ввода-вывода дескрипторами, которые являлись устройствами STREAMS (см. главу 31), но это ограничение было снято в SVR4.
#include <sys/select.h>
#include <sys/time.h>
int select(int maxfdp1, fd_set *readset, fd_set *writeset,
fd_set *exceptset, const struct timeval *timeout);
Возвращает: положительное число - счетчик готовых дескрипторов, 0 в случае тайм-аута, -1 в случае ошибки
Описание этой функции мы начнем с последнего аргумента, который сообщает ядру, сколько следует ждать, пока один из заданных дескрипторов не будет готов. Структура timeval задает число секунд и микросекунд:
struct timeval {
long tv_sec; /* секунды */
long tv_usec; /* микросекунды */
};
С помощью этого аргумента можно реализовать три сценария:
1. Ждать вечно: завершать работу, только когда один из заданных дескрипторов готов для ввода-вывода. Для этого нужно определить аргумент timeout как пустой указатель.
2. Ждать в течение определенного времени: завершение будет происходить, когда один из заданных дескрипторов готов для ввода-вывода, но период ожидания ограничивается количеством секунд и микросекунд, заданным в структуре timeval, на которую указывает аргумент timeout.
3. Не ждать вообще: завершение происходит сразу же после проверки дескрипторов. Это называется опросом (polling). Аргумент timeout должен указывать на структуру timeval, а значение таймера (число секунд и микросекунд, заданных этой структурой) должно быть нулевым.
Ожидание в первых двух случаях обычно прерывается, когда процесс перехватывает сигнал и возвращается из обработчика сигнала.
ПРИМЕЧАНИЕЯдра реализаций, происходящих от Беркли, никогда автоматически не перезапускают функцию select [128, с. 527], в то время как ядра SVR4 перезапускают, если задан флаг SA_RESTART при установке обработчика сигнала. Это значит, что в целях переносимости мы должны быть готовы к тому, что функция select возвратит ошибку EINTR, если мы перехватываем сигналы.