Михаил Гук - Аппаратные интерфейсы ПК. Энциклопедия
На входы контроллеров прерываний поступают запросы от системных устройств (клавиатура, системный таймер, CMOS-таймер, сопроцессор), периферийных контроллеров системной платы и от карт расширения. Традиционно все линии запросов, не занятые перечисленными устройствами, присутствуют на всех слотах шины ISA/EISA. Эти линии обозначаются как IRQx и имеют общепринятое назначение (табл. 12.2). Часть этих линий отдается в распоряжение шины PCI. В таблице отражены и приоритеты прерываний — запросы расположены в порядке их убывания. Номера векторов, соответствующих линиям запросов контроллеров, система приоритетов и некоторые другие параметры задаются программно при инициализации контроллеров. Эти основные настройки остаются традиционными для обеспечения совместимости с программным обеспечением.
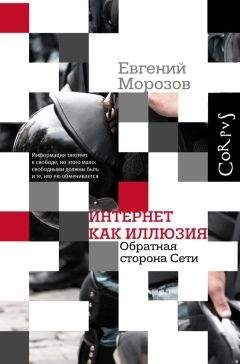
Для запросов прерывания с шины PCI используются 4 линии запросов прерывания, которые обозначают как INTR А, В, С, D. Эти линии работают по низкому уровню, что дает возможность их разделения (совместного использования). Линии циклически сдвигаются в слотах и независимо коммутируются на доступные линии IRQx с помощью конфигурационных регистров чипсета. Линии IRQx, используемые шиной PCI, становятся недоступными для шины ISA. «Дележку» линий между шинами, а также управление чувствительностью отдельных линий обеспечивают параметры CMOS Setup, а также система PnP. В параметрах ISA или Legacy подразумевают использование линий IRQx традиционными адаптерами шины ISA (статическое распределение), a PCI/PnP — использование адаптерами шины PCI или адаптерами PnP для шины ISA (динамическое распределение). Общая схема формирования запросов прерываний изображена на рис. 12.1.
Рис. 12.1. Коммутация запросов прерываний
Каждому устройству, для поддержки работы которого требуются прерывания, должен быть назначен свой номер прерывания. Назначения номеров прерываний выполняются с двух сторон: во-первых, адаптер, нуждающийся в прерываниях, должен быть сконфигурирован на использование конкретной линии шины (джамперами или программно). Во-вторых, программное обеспечение, поддерживающее данный адаптер, должно быть проинформировано о номере используемого вектора. В процессе назначения прерываний может участвовать система PnP для шин ISA и PCI, для распределения линий запросов между шинами служат специальные параметры CMOS Setup.
Контроллер прерываний позволяет программировать свои входы на чувствительность к уровню или перепаду сигнала.
♦ Чувствительность к уровню (level sensitive) означает, что контроллер прерываний вырабатывает запрос прерывания процессора по факту обнаружения определенного уровня (на ISA — высокого) на входе DRQx. Если к моменту завершения обработки этого запроса (после записи команды EOI в регистр контроллера прерываний) контроллер снова обнаруживает активный уровень на том же входе DRQx, то он снова сформирует запрос на прерывание процессора.
♦ Чувствительность к перепаду (edge sensitive) означает, что контроллер прерываний вырабатывает запрос прерывания процессора только по факту обнаружения перепада (на ISA — положительного) на входе DRQx. Повторно запрос по этому входу возможен только по следующему такому же перепаду, то есть сигнал предварительно должен вернуться в исходное состояние.
В любом случае сигнал запроса аппаратного прерывания IRQx должен удерживаться генерирующей его схемой, по крайней мере, до цикла подтверждения прерывания процессором. В противном случае источник прерывания корректно идентифицирован не будет, и контроллер сообщит ложный вектор прерывания (spurious interrupt), соответствующий его входу с максимальным номером (IRQ7 для первого контроллера и IRQ15 для второго). Обычно адаптеры строят так, что сигнал запроса сбрасывается при обращении программы обслуживания прерывания к соответствующим регистрам адаптера.
В шине ISA прерывание вырабатывается по положительному перепаду сигнала на линии запроса. Это плохо по двум причинам: такой способ подачи сигнала, во-первых, имеет меньшую помехозащищенность, чем срабатывание по отрицательному перепаду, во-вторых, отрезает путь к нормальному разделению линий запросов (см. ниже), для которого полностью пригоден способ подачи сигнала по низкому уровню. Поскольку традиционный контроллер позволяет задавать чувствительность — уровень (Level) или перепад (Edge) — только для всех входов одновременно, в общем случае разделяемые прерывания на шине ISA вместе с корректной работой системных устройств использоваться не могут.
На современных системных платах функции контроллеров прерываний возлагаются на чипсет, который может иметь и более гибкие возможности управления, чем пара контроллеров 8259A. В операционном режиме всегда сохраняется программная совместимость с 8259A. Процедура инициализации контроллеров может и отличаться от традиционной, но ею занимается тест POST, который «знает» особенности системной платы. В симметричных мультипроцессорных системах аппаратные прерывания работают сложнее, поскольку их могут обслуживать различные процессоры. Для реализаций системы прерываний процессоры Pentium и выше имеют встроенный контроллер прерываний APIC (Advanced Programmable Interruption Controller). Внутренние контроллеры процессоров связаны между собой по шине APIC, к которой подключена и «ответная часть» чипсета, преобразующая запросы аппаратных прерываний в сигналы протокола APIC. В операционном режиме такая связка также совместима с 8259A.
12.3.1. Совместное использование прерываний
Линии запросов прерываний в компьютере, насыщенном дополнительными адаптерами, являются самым дефицитным ресурсом, поэтому возникает желание использовать эти линии совместно, то есть применять разделяемые прерывания между несколькими устройствами (shared interrupts). Обработчики прерываний (программы) от разных устройств, разделяющих одну линию запроса (и следовательно, общий вектор прерывания), должны быть выстроены в цепочку. В процессе обработки прерывания очередной обработчик в цепочке чтением известного ему регистра своего устройства должен определить, не это ли устройство вызвало прерывание. Если это, то обработчик должен выполнить необходимые действия и сбросить сигнал запроса прерывания от своего устройства, после чего передать управление следующему обработчику в цепочке; в противном случае он просто передает управление следующему обработчику.
Разделяемые прерывания для разнотипных устройств в общем случае работоспособными считать нельзя. Во-первых, у каждого устройства факт прерывания программно обнаруживается по-своему, и этот способ знает только драйвер этого устройства. Так что программно для совместного использования прерываний их обработчики должны уметь выстраиваться в цепочки, что на практике выполняется не всегда корректно. Во-вторых, возможны потери прерываний от устройств, требующих быстрой реакции. Это может происходить, если обработчик такого устройства окажется в конце цепочки, а предшествующие ему обработчики окажутся «нерасторопными» (не самым быстрым способом обнаружат, что прерывание — не их). Поведение системы в такой ситуации может меняться в зависимости от порядка загрузки драйверов. Для нескольких однотипных устройств (например, сетевых адаптеров на одном и том же кристалле), пользующихся одним драйвером, разделяемые прерывания работают вполне успешно.
Чтобы прерывания, одновременно возникающие от нескольких устройств, не терялись, контроллер прерываний должен быть чувствительным к уровню, а не к перепаду на входе запроса. В соответствие со схемотехникой логики ТТЛ и КМОП активным уровнем должен быть низкий; выходной формирователь сигнала запросов у адаптеров — с открытым коллектором (ТТЛ) или открытым стоком (КМОП); вход запроса у контроллера должен быть «подтянут» к высокому уровню резистором. Тогда непосредственное соединение этих выходов со входом контроллера («Монтажное И») даст требуемый результат в аппаратном плане, а в программном плане необходимо корректно выстроить обработчики в цепочку.
Поясним, почему надежное разделение прерываний при чувствительности к перепаду на линии запроса невозможно. Если устройство 1 выработает сигнал запроса после того, как его выработает (но еще не снимет) устройство 2, то контроллер обработает только один запрос. Цепочка программных обработчиков окажется ненадежной: если обработчик устройства 1 в этой цепочке будет проверять свое устройство до возникновения прерывания, то прерывание будет потеряно. Поскольку прерывания по своей природе обычно асинхронны, работа этих устройств совместно с поддерживающими программами будет загадочно нестабильной.